Self-reconfigurable robots (SRRs) that can automatically change shape and adapt to their surrounding environment have recently attracted a lot of interest within the robotics research community. These robots could have several useful applications, as they can acquire a high level of autonomy in sensing their surrounding environment, as well as in planning and performing suitable actions. While past studies have introduced methods to classify these robots into subgroups, there is still no standard procedure to evaluate their performance.
With this in mind, researchers at Sun Yat-sen University in China and the and Singapore University of Technology and Design have recently developed a framework for the taxonomy and evaluation (TAEV) of self-reconfigurable robots. Their study, featured in IEEE Access, was funded by the Singapore National Robotics R&D Program Office.
“So far, researchers have devised a qualitative approach for classifying SRRs, but not quantitative methods that can guide the designer, manufacturer and robot user,” Abdullah Aamir Hayat, one of the researchers who carried out the study, told TechXplore. “This motivated us to develop a framework and evaluation method for SRRs.”
In SRRs, the ability to change shape to complete a given task primarily relies on the type of mechanisms employed by the robots and their level of autonomy. While some SRR systems are fully autonomous, others require some degree of manual teleoperation.
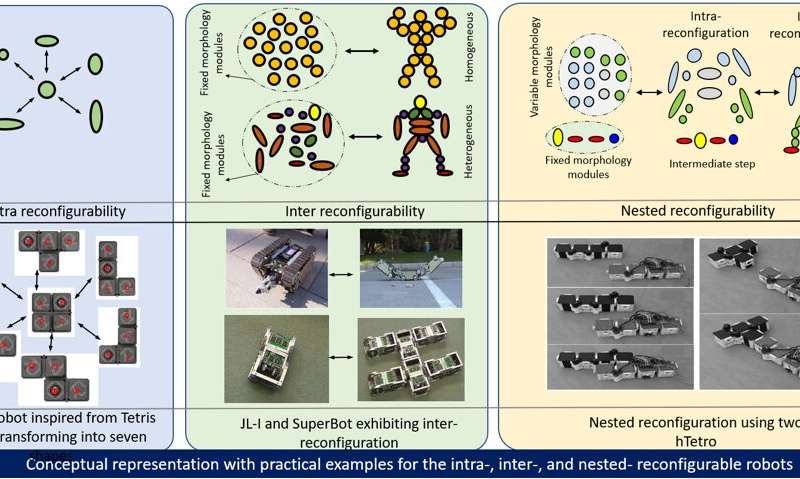
At a mechanical level, the robots can be classified into three main categories: those with an intra-, inter-, and nested reconfiguration. The difference between intra- and inter- reconfigurations lies in the number of configurations available to the robot and the scale of these configurations.
Intra-reconfigurability involves a single robotic module that can change its morphology without any assembly or disassembly, while inter-reconfigurability involves two or more modules that can assemble or disassemble. Finally, nested reconfiguration, coined by Prof. Mohan Rajesh Elara and Prof. Kristin L. Wood, combines features of both the intra- and inter-reconfigurations.
In their paper, Hayat and their colleagues introduced metrics that can be used to evaluate SRRs, quantifying their level of autonomy and the number of configurations available to them. These metrics were combined to create a TAEV framework that could guide researchers and manufacturers in evaluating their robotic systems.
“Our work quantifies mechanism reconfigurability by assigning an index on the basis of a number of meaning morphology and the number of modules involved,” Hayat explained. “These indices are represented on the two axes (X- and Y-) in the three-axis frame. The third axis (Z-) is assigned with the index given by the level of autonomy which is calculated using the cobweb evaluation model consisting of six performance indicators namely reconfiguration planning, decision making, interface autonomy, perception, and workspace.”
The main advantage of the framework developed by Hayat and his colleagues is that it allocates a unique index to a given SRR within the 3-D taxonomy space that they outlined in their paper. As a result, it could be used to design trade-off studies and devise approaches to assess or compare the performance of different SRRs on the same task.
“The generic framework we presented can be applied to numerous existing SRRs, allowing them to be classified not only qualitatively based on their size, locomotion, etc. but also quantitatively, incorporating the mechanism and autonomy of the robots,” Hayat said.
In the future, this framework for TAEV could help to evaluate SRRs more effectively, while also identifying their limitations and features that could be improved. Both researchers and manufacturers could use it to compare the performance of different robots on the same tasks or to evaluate different versions of the same robot. In their paper, Hayat and their colleagues also discuss other potential applications for the new framework, using existing robots as examples.
“Our findings suggest that there is tremendous potential for novel robot designs with autonomy to occupy the three-dimensional space and that nested reconfigurable architectures could have many practical applications,” Hayat said. “With this in mind, our group is working on implementing novel intra-, inter-, and nested-reconfigurable robotic architectures for performing maintenance tasks, namely autonomous cleaning and surveillance.”
